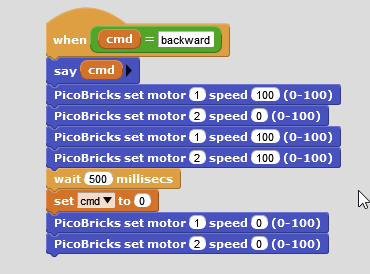
Motor backward & forward

Working through the Voice Controlled car activity, and trying to expand it some. I was able to get the bluetooth HC-05 board to work (though had to wire it manually), and able to read the commands in and drive the motors.
I want to modify the "backward" command to drive the motor in reverse, not just try and u-turn the car.
Looking at the motor board, it looks like each motor is GP21-Gnd and GP22-Gnd connections. As such I cannot swap the input direction as you normally would. Guessing this was done to conserve GP pins. Am I right that because of this I am unable to run a motor in reverse using code?
To fix this I would need to hijack another GP pin allocation and drive that directly, correct?
Comments
-
You could not do it like that either, since there won't be another controller involved. If you have more than one kit, you could use one controller for fwd, and the other bwd, if you use 4 wheels. But the better solution would be to get an h- bridge controller to drive the DC motors.
Another option is to use 360 deg servos. Those you could fwd / bwd off of the pico controller.
2 -
I got reverse by simply pivoting 180 then forward command.
but ya there is no way to reverse polarity at motors with software.
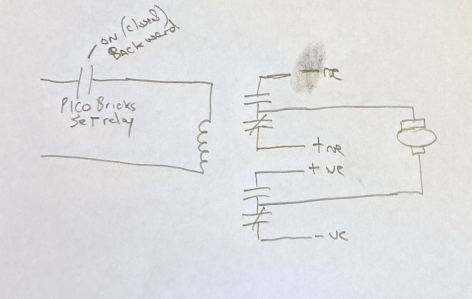
Having said that, one could use relaying to flip polarity on motors on backward command.
If one picks up the relay witch in-turn picks up a double pole double throw (c form) relay, polarity could be reversed on motors.
tx
Gilles
0


Howdy, Stranger!
Categories
- 115 All Categories
- 3 Community
- 3 Hello Maker!
- 100 PicoBricks - Make, Run, Split, Merge
- 1 PicoBricks IDE
- 1 Arduino IDE
- 30 Hardware Support
- 15 PicoBricks Backers Hub
- 49 MicroBlocks Support
- 2 Shipping Support
- 2 MicroPython
- REX - 8 in 1
- Mechanical Parts and Parkour
- REX Main
- Arduino-IDE
- REX - Shipping
- 12 Products & Technology
- 2 Raspberry Pi
- Arduino
- 10 Other